EAST LANSING, Mich. - Need a robot with a soft touch? A team of Michigan State University engineers has designed and developed a novel humanoid hand that may be able to help.
In industrial settings, robots often are used for tasks that require repetitive grasping and manipulation of objects. The end of a robot where a human hand would be found is known as an end effector or gripper.
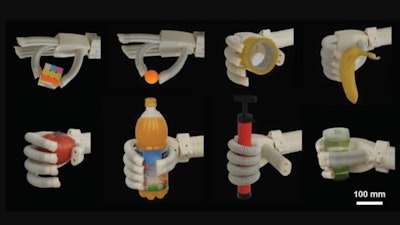
"The novel humanoid hand design is a soft-hard hybrid flexible gripper. It can generate larger grasping force than a traditional pure soft hand, and simultaneously be more stable for accurate manipulation than other counterparts used for heavier objects," said lead author Changyong Cao, director of the Laboratory for Soft Machines and Electronics at MSU and assistant professor in Packaging, Mechanical Engineering, and Electrical and Computer Engineering.
This new research, "Soft Humanoid Hands with Large Grasping Force Enabled by Flexible Hybrid Pneumatic Actuators," is published in Soft Robotics.
Generally, soft-hand grippers -- which are used primarily in settings where an object may be fragile, light and irregularly shaped -- present several disadvantages: sharp surfaces, poor stability in grasping unbalanced loads and relatively weak grasping force for handling heavy loads.
When designing the new model, Cao and his team took into consideration a number of human-environment interactions, from fruit picking to sensitive medical care. They identified that some processes require a safe but firm interaction with fragile objects; most existing gripping systems are not suitable for these purposes.
The team explained that the design novelty resulted in a prototype demonstrating the merits of a responsive, fast, lightweight gripper capable of handling a multitude of tasks that traditionally required different types of gripping systems.
Each finger of the soft humanoid hand is constructed from a flexible hybrid pneumatic actuator -- or FHPA -- driven to bend by pressurized air, creating a modular framework for movement in which each digit moves independently of the others.
"Traditional rigid grippers for industrial applications are generally made of simple but re- liable rigid structures that help in generating large forces, high accuracy and repeatability," Cao said. "The proposed soft humanoid hand has demonstrated excellent adaptability and compatibility in grasping complex-shaped and fragile objects while simultaneously maintaining a high level of stiffness for exerting strong clamping forces to lift heavy loads."
In essence, the best of both worlds, Cao explained.
The FHPA is composed of both hard and soft components, built around a unique structural combination of actuated air bladders and a bone-like spring core.
"They combine the advantages of the deformability, adaptability and compliance of soft grippers while maintaining the large output force originated from the rigidity of the actuator," Cao said.
He believes the prototype can be useful in industries such as fruit picking, automated packaging, medical care, rehabilitation and surgical robotics.
With ample room for future research and development, the team hopes to combine its advances with Cao's recent work on so-called 'smart' grippers, integrating printed sensors in the gripping material. And by combining the hybrid gripper with 'soft arms' models, the researchers aim to more accurately mimic precise human actions.